








公众号/将门·
来源:IEEE spectrum/NASA/github 整理:T.R
相信大家一定还记得好奇号和机遇号火星车登陆时激动人心的场景吧,人类又一次打开了火星的大门开始深入地探索。

几年过去了,你是否还在怀念火星车的样子呢?为了满足粉丝们的热情,喷气动力实验室(JPL)开源了一款火星漫游者全套软硬件模型,供世界各地的爱好者创造自己的漫游者。这也是想入坑机器人、控制、电子制作的好机会呢!

有两款颜色哦
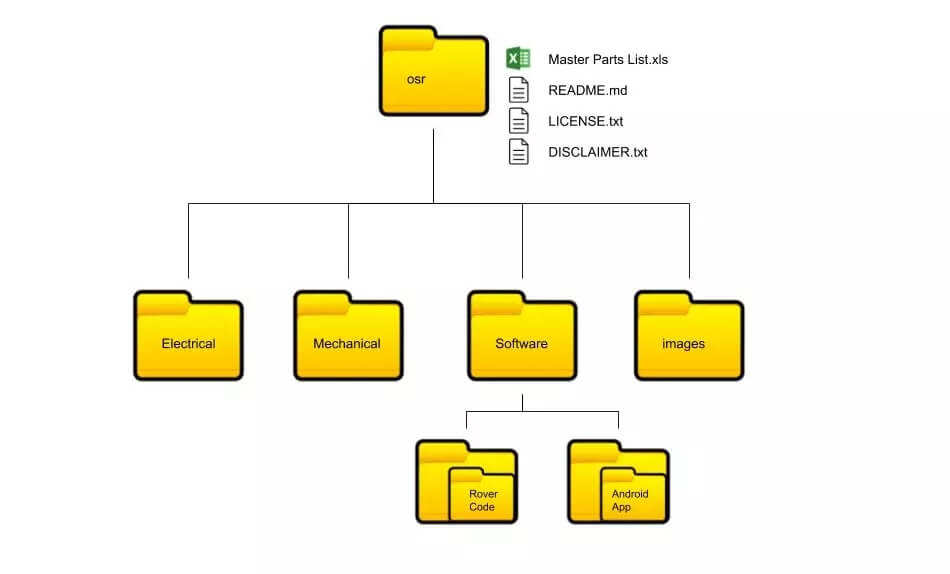
在整个项目里主要文件分为电气、机械和软件部分。每一部分都有详尽的开箱指南来指导我们一步步制作。下面就让我们一起来看看吧!
这款开源的漫游者小车长宽大约30cm,重量11.34kg。根据文档来,在5200mAh电池下可以实现五小时的续航。虽然速度有点慢只有约17cm/s,不过在充满障碍的火星上自主运动已经算很快了!
机械部分
机器人的基础是机械,这部分主要包含了轮子、身体和转向架、差动转轴几个部分。

所有的结构都附有CAD图纸.stl文件,可以根据需要自己加工或者3D打印。一个周末的时间机身基本就可以加工完成并组装好啦。
电气部分
在准备机械部分的同时,电气也可以开工了!
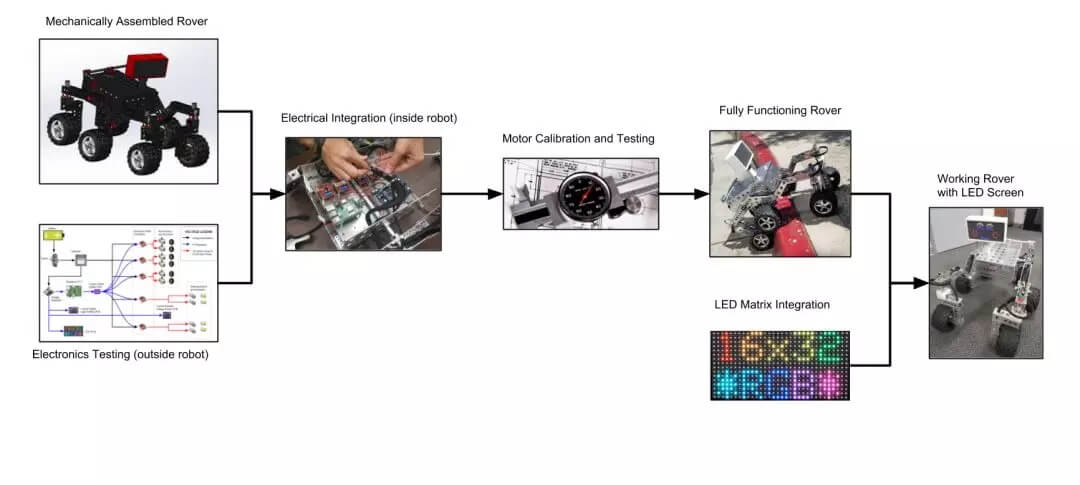
在安装所有的电气设备前,都应该先测试其功能和接线,JPL贴心的提供了供电系统和通信系统的所有接线图。按照接线先测试好自己的电机和驱动板,通过之后就可以安装在组装好的机器人本体上了。
这里主要包括了六个轮驱动电机和编码器,四个转向电机和编码器,以及各种用户设备和一块树莓派3主控板,主要以串口通信的方式进行控制。
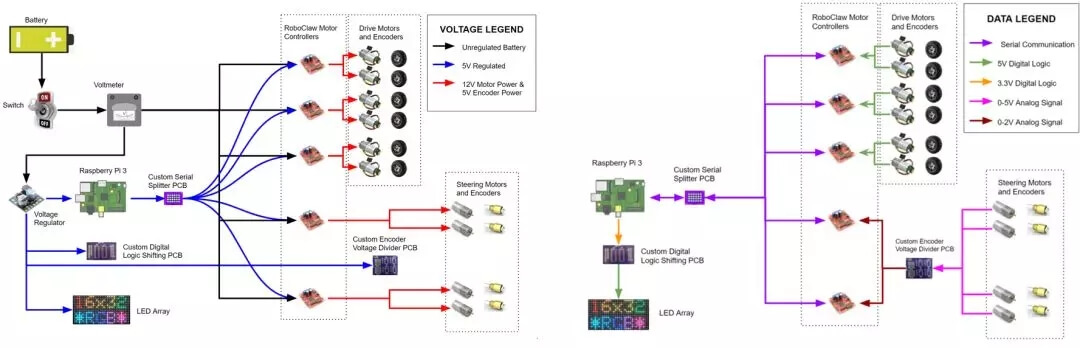
接线图
软件
在完成了机械组装和电气连接之后,现在可以开启软件模式了。所有的控制和处理都在树莓派上进行。软件是基于python写成的,其中包含了电机控制、串口通信、外设等已经写好的工具,调用后稍加改动即可运行。
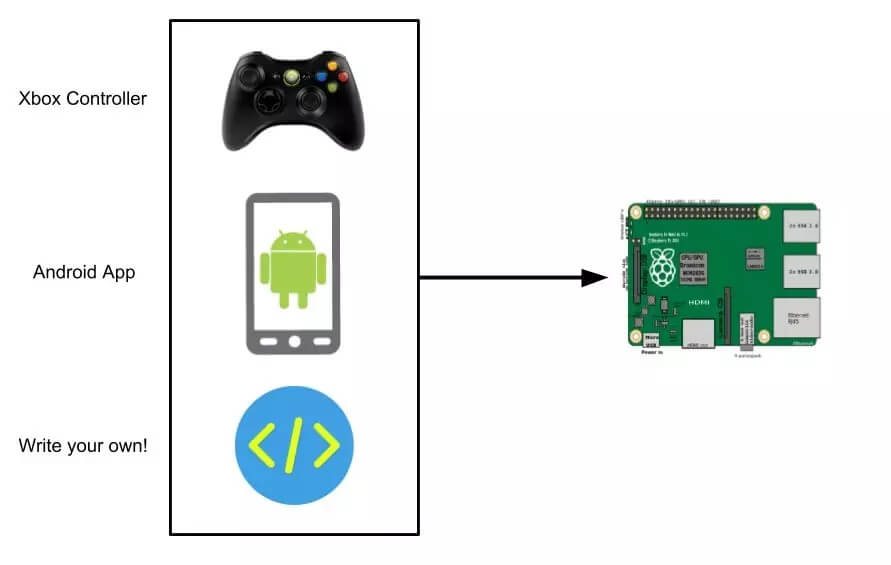
开源工具包里还提供了手柄、安卓app来控制它,不过根据通信协议你也可以写自己编写程序来控制。
完成以上步骤后,你的机器人就可以开动了。这可以作为一个实验性平台来搭载其他的有效载荷实现更为复杂的任务,可以基于它制作野外机器人,安装更为丰富的传感器、配备更加强大的算法来使得它变得更加智能。
JPL的研究人员表示,开源这一套漫游者项目的目的一方面在于推动学生和爱好者们对于机器人特别是火星机器人的兴趣。这个项目不仅给出了制造机器人的方法,更在文档中详述了设计的工程经验和方法。同时提供了包括机械、软件、电气等各个方面的教程,在制作过程中掌握一系列能力。更重要的是,除了教育之外JPL更想集中群众的智慧,一同改进现有结构实现更加优秀的火星车。
梦想还是要有的,万一去火星了呢?不如就先从这个小车开始吧!尝试着改进,加上一些自己的传感器,设计几个算法?说不定哪天我们的设计可以上天去火星呢!

 友情链接
友情链接