








公众号/将门创投
From: Caltech 编译T.R
如果无人机长了腿会怎么样?或者,长翅膀的双足机器人呢?
当然是要上天了!
机器人技术飞速发展,无论是无人机还是双足机器人都取得了巨大的进步。但横在他们面前还有一些一直未被解决的问题。对无人机特别是多轴无人机来说,能耗一直是头疼的大问题,特别是在悬停的时候需要耗费很多电能维持高度和姿态的稳定。
另一方面,对于足式机器人特别是双足机器人来说,崎岖的地面一直难以处理的情形,更别说跨越野外的深沟峡谷、高墙险阻了。甚至对于人类来说,在崎岖不平的里面上走路都会崴了脚,摔倒连扶的地方的都没有。
那种能够跨过山和大海的机器人,可以在复杂环境中自由穿行的机器人何时才能到来呢?
为了探索这个问题,加州理工航空机器人实验室的研究人员将双足机器人和无人机结合在了一起研发出了一款长了腿的无人机/长了翅膀的足式机器人(LEg ON Aerial Robotic DrOne,LEONARDO),它长下面这个样子:
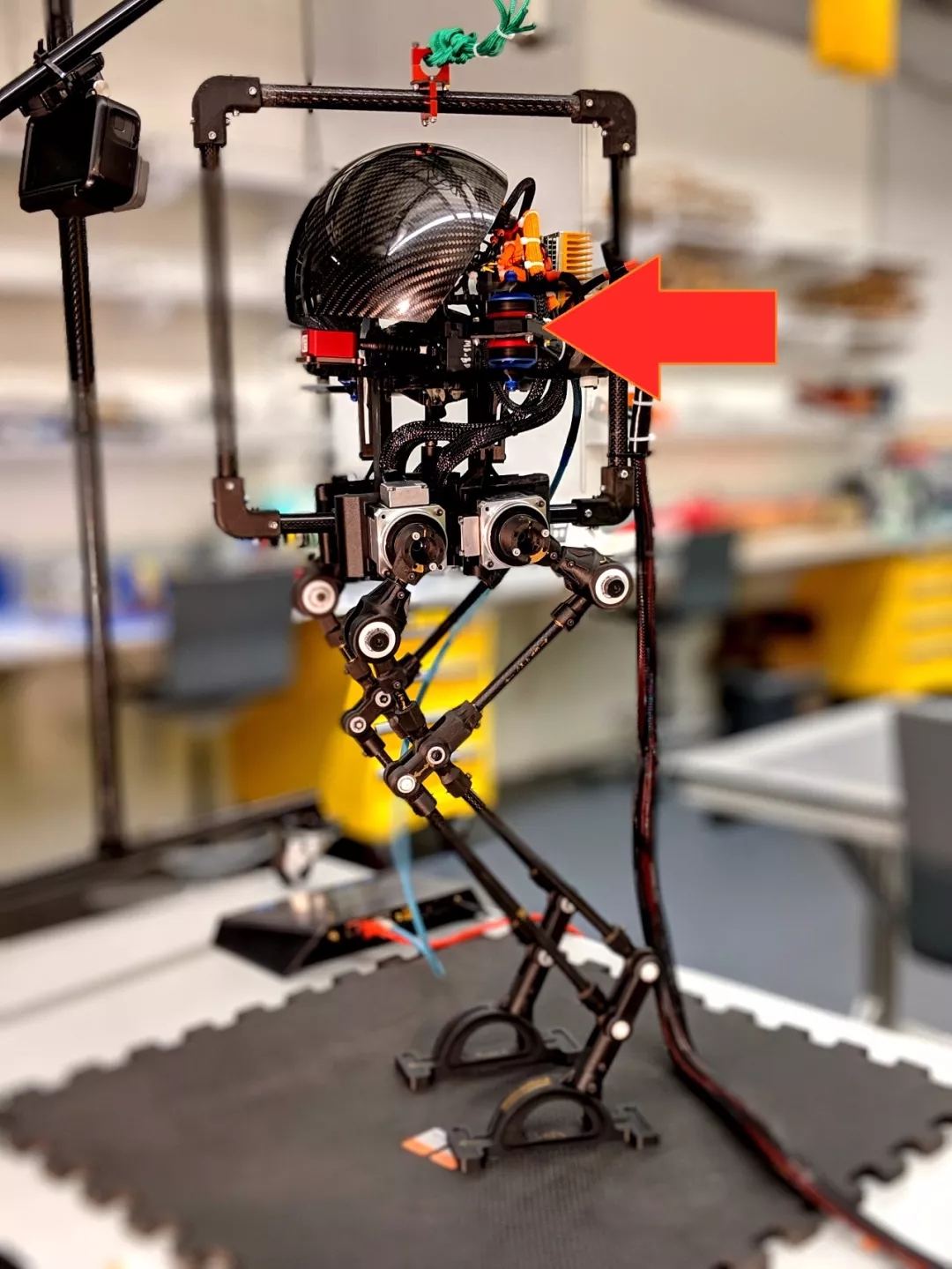
这个简称为leo的机器人身高不到两尺有余,但形貌奇特。乍一看也许会觉得与双足机器人很相似,但细看图中箭头处会发现在它的两侧各安装了一对螺旋桨,为机器人提供额外的推力。它的足部关节电机与螺旋桨是协同工作实现闭环控制的,这意味着机器人可以同时依靠腿部和”翅膀”的推力保持平衡和位姿,不仅可以面对复杂路况,更可用高难度位姿辅助作业。由于使用了碳纤维材料整个机器人重量不足三公斤,两侧的螺旋桨有足够的推力将机器人带到空中。但研究人员的初衷并不只是让机器人上天。
研究人员表示,这样独特的构造是为了结合双足机器人和无人机的优势,互相弥补各自存在的不足。例如对于双足机器人来说,弹跳能力是一种越过障碍的方式,在螺旋桨的助推下,可以让机器人跳的更高更远,在下落的时候也能更稳定减小对于内部结构和关键的冲击。在面对沟壑峡谷时,可以借助旋翼跨过曾经难以逾越的障碍。当踩到不平整的地面要摔倒时、额外的助力将帮助它站稳脚跟不至于摔个脚朝天。
同样对于无人机来说,近地悬停是一个高难度且十分耗能的任务。但当它下面长了腿,起到支撑作用克服机体的重力就可以稳稳当当的地面附近观测作业了。在野外特别是遍布峡谷沟壑的冰川、山地等地区,这种类型的机器人将会有很大的应用场景。
但这种机器人并不是研究人员凭空想象出来的,它们其实借鉴了日常生活中最常见的动物来获取灵感。也许你已经想到了,仿生的对象就是天空中自由飞翔的鸟儿!
它们可以再地面上步行觅食、也可以在天空之展翅翱翔、也可以边蹦边借助翅膀跨过障碍。这一研究的主要研究人员Alireza Ramezani从生物方面获得了大量的启发,并将这些思想用于机器人的开发实践中。2017年一款十分优秀的仿生蝙蝠也是这位Ramezani的作品,模仿蝙蝠的构造实现了极其灵活的飞行,并登上了Science Robotics的封面。

不过这并不是唯一一个长脚的飞行机器人。
东京大学的研究人员在去年就发布过一款类似的称为Aerial-Biped机器人,但这一机器人主要的目的在于增强机器人的物理表现能力,通过新颖的步态轨迹规划方法实现更好的交互运动。和上面的机器人比起来它的腿还没有那么粗壮。

UCLA在更早的2016年还推出过一个名为BALLU的机器人,简单来说在气球下加了两条腿。也是借用了气球的浮力克服重力,实现更灵活的控制。由于没有负重它就避免了一系列双足机器人的倾倒问题。
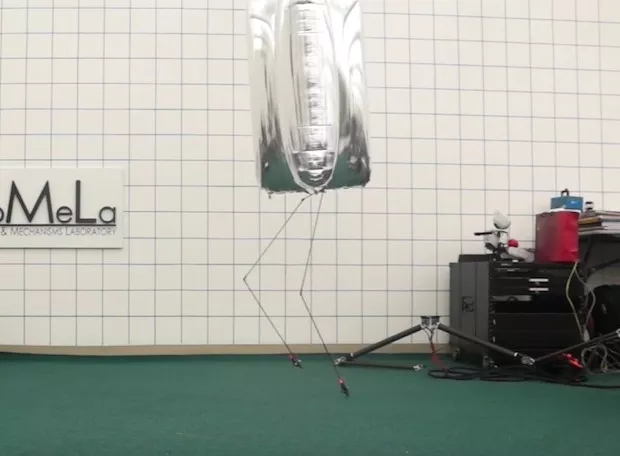
克服重力的影响确实为机器人的控制带来了一系列优势。
除了旋翼,固定翼飞机也不示弱。15年洛桑理工也提出了一款可以用翅膀走路的固定翼无人机DALER,对于固定翼飞机来拓展了在狭小空间工作的能力,真正实现天上飞地下跑了。

这也许预示着机器人的发展方向,多功能全方位的机器人通过全面的运动能力将不断扩大适用范围和应用领域。未来的机器人将结合多种运动方式协同工作,共同克服实用过程中面临的诸多挑战,成为能飞能跑、能下水能钻洞的全能选手。
ref:
http://www.ece.neu.edu/news/developing-robots-dont-fall
https://web.northeastern.edu/silicon-synapse/research/
CAST:http://cast.caltech.edu/
Aero:http://aerospacerobotics.caltech.edu/aerospacerobotics
https://phys.org/news/2019-01-robots-readied-nuclear-no-go-zones.html
Biped:https://goo.gl/y67353
https://media.siggraph.org//international-resources/audioguides/s2018/emergingtech/cmn/02-cmn-Aerial-Biped.mp3
BALLU:https://spectrum.ieee.org/automaton/robotics/humanoids/ballu-uclas-humanoid-blimp-robot
http://www.romela.org/
https://actu.epfl.ch/news/a-flying-robot-that-can-walk-3/
https://www.zhihu.com/question/23676158
https://dribbble.com/shots/3706229-SK8

 友情链接
友情链接