








公众号/将门创投
From: Tech Crunch; 作者:Iris
Facebook正在打造能在模拟现实环境中进行导航,并能与用户进行互动的人工智能体,但这项工作从计算的角度来讲耗时耗力且费用不菲,因此技术人员不得不考虑砍掉性能不高的项目,寻找更高效率的模拟方式。
长期以来,外界都在猜测Facebook究竟利用AI做些什么。最近Facebook研究团队透露出对“嵌入式人工智能”的兴趣和研究。“嵌入式人工智能”,指的是机器学习系统可以与周围环境智能互动。例如,利用对话语境响应语音命令,以及对所处的环境进行判断。目前,Facebook已经招募了专业技术人才来研究这一领域的相关工作。
量身定制的AI训练平台
要创建这样的“嵌入式”系统,Facebook团队必须将AI助手放入真实世界的环境中来训练它们,毕竟没见过走廊的AI助手不可能知道什么是墙壁,什么是门。但考虑到现实生活中机器人缓慢的移动速度,团队可不能指望它们自学成才。这也就是Facebook创建AI虚拟家园Habitat的原因。Habitat是仿真3D平台,研究人员利用高效的3D模拟器来引导AI助手,训练它们从人机交互中进行深度学习以及基于环境展开人机对话等能力。

Habitat的现实仿真示意图
不过,与简单的虚拟环境相比,要建立逼真的3D环境需要大量的计算,这也会对AI助手的学习速度造成限制。为了解决这个问题,由Dhruv Batra和Erik Wijmans领导的研究团队找到了一种能加快计算速度的方法,通过这种计算方法,AI助手在3D环境中的导航成功率能够高达99.9%。
“导航是AI助手的首要任务。如果它们有地图,导航工作对它们而言就是小菜一碟,但若没有地图,它们的回答就呈开放性。在导航上的失败意味着AI助手很可能在数据计算中出现不可预计的技术崩溃。”研究人员解释道。他们发现,问题出在模拟系统花了太多的时间来等待那些“总是慢一拍的选手”,也就是我们所熟知的“短板效应”。系统必须等待所有被调度的机器人完成任务并返回报告。如果单个AI助手花费的时间是其他助手的10倍之多,这意味着在系统等着更新信息的间隙中,会浪费掉大量时间。
这便是Facebook团队展现他们的创新手段之处——优胜劣汰。赶在这些落后者完成任务之前,他们就将其剔除,以保证效率最高的AI助手所收集的数据能够被全部添加到系统之中。
Wijmans发现了一个有趣的现象,他说道:“所有这些机器人都会在工作中互相交谈。其中一个会告诉其他助手‘好了,我差不多完成了’,然后它们会各自汇报自己的进展。任何发现自己落后于其他个体的助手都会立刻减少自己的计算步骤,以求快速完成任务。”也就是说,在这种情况下,你可以看到AI助手们在同一时间停止工作,并同时共享自己的工作内容。如果一个AI助手的工作效率不佳,它会真切地感觉很糟糕,并会受到系统的“惩罚”。
研究人员给机器人加入了拟人化的计算程序,使其在任务失败时“产生糟糕的危机感”,让其更加人性化。本质上,它们的失败源于低效的算法,但是它们贡献的数据仍然是有价值的。Wijmans表示,团队将充分汲取AI助手积累的所有经验,无论那是成功的经验,抑或是失败的教训,他们都能从中学习,找到漏洞,从而持续更新优化的算法。
发现提升机器学习能力的突破口
在新一轮的测验中,研究人员发现分散分布式近端策略优化(DD-PPO)系统具有更理想的高性能,在模拟中,能帮助提高机器人的计算能力,甚至能使计算能力提高10倍会得到接近10倍的效果。得益于此,Facebook的研究人员可以在指定的时间内,在虚拟环境中训练出能够解决点对点导航任务的AI助手,其可靠性高达99.9%。它们甚至展现了自我纠正错误的功能,能够快速识别出自己是否走错了路,然后返回到另一条正确的道路上。这也是强大的记忆网络作用的结果。

AI助手利用记忆网络解读《魔戒》
研究人员推测,这些机器人已经学会了如何利用环境结构规律。这是否代表着人工智能找到了在模拟中作弊的方法呢?不过Wijmans解释道,这种方法更能帮助它们掌握一些实际的布局规则。
研究团队的下一个目标是找到让AI助手用更少的资源完成任务的方法。每个助手都配备有一台虚拟摄像机,它可以提供普通图像和经过深度视觉分析后的图像。它们同时配有一个可靠的坐标系统指导它们的前进方向,以及一枚始终指向目标的指南针。但即使有了这些资源,即使有更多的训练时间,助手们能顺利完成任务的成功率也并不理想。
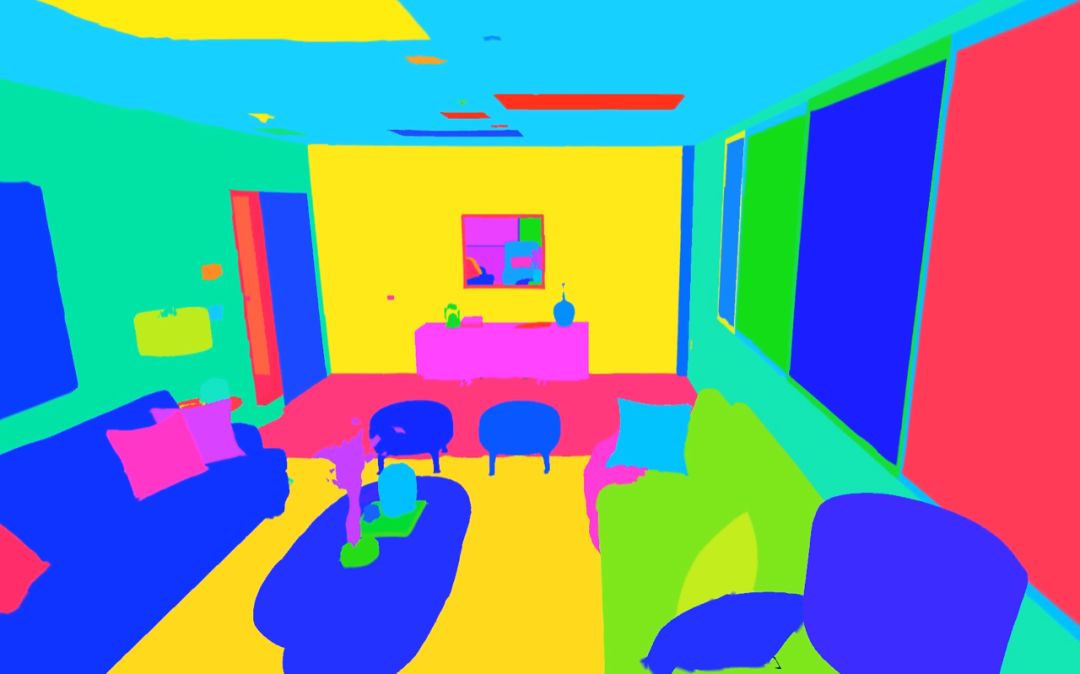
经过深度视觉分析后在语义上进行标记的图像
“在改进之前,Habitat对机器人们来说,仍是一个静态的小宇宙,”Wijmans说,“它们可以移动并撞到墙壁,但不能打开抽屉或打翻桌子。我们这样做是想要实现快捷的、大规模的模拟——但是如果你想解决像‘从我的桌子上拿起我的笔记本’这样的任务,你最好自己去拿起那台笔记本。”
因此,在改进后,Habitat已允许用户在虚拟环境中命令AI助手对指定的对象施加力和检查碰撞情况等等。毕竟,导航工作只是AI助手在人机互动领域前进的第一步。若要进一步发展,这个领域中还有更多的东西等着AI助手去探索。
这些改进会使Habitat成为一个更全面而完善的实验平台。改进后,在平台上接受训练的机器人有望直接将自身在虚拟环境的学习成果应用于现实世界中。研究团队已经开始着手这方面的工作,接下来还会发表相关论文来解释各类工作进度和内容。

 友情链接
友情链接