








公众号/将门创投
From: Github; 编译:Iris
3D摄影相机利用图像渲染技术实现了视图合成,一种能够生成全新视觉感知的功能。相比起2D摄影,它能为摄影者提供沉浸式体验:平面显示器上的每张照片都有着优异的图片感知质量,呈现栩栩如生的立体视觉效果。
由弗吉尼亚理工大学、台湾清华大学和 Facebook 组成的研究团队围绕3D摄影的概念,基于基础学习(learning-based)修复模型,深入探讨了将RGB-D 输入图像进行渲染以生成3D 照片的方法,同时保留原始图像的颜色和深度结构,借助分层深度视图技术合成新3D视图。
点击下方链接,复习相关文章!
同样是影像修复技术,百年前的老电影是如何复原的?
新式图像重建和渲染技术
传统的3D摄影采用“刚性”层结构生成分层深度图像(LDI),由于其视图圆角更紧凑,可以将视图转换为轻量级的网格来进行渲染。它使用了各向同性扩散算法来绘制视图颜色,不过,这种算法容易产生近似于磨皮的视觉效果,不能很好地呈现图像的纹理和结构。
“刚性”层结构的另一个问题在于,图像中的每个像素层数都是固定的。然而在视图深度不连续的情况下,往往会出现一个像素层内的像素含量突然改变的状况,从而破坏了卷积核接受域内的局部性。

从左到右依次为深度扭曲图像、深度拉伸图像、Facebook 3D图像和经新型算法调整后的图像
基础学习修复模型的优势就是直接将RGB-D图像转换为3D照片。与“刚性”层结构不同,新视图能存储像素之间的连接结构,能容许转换过程中像素量的变化。基础学习修复模型能与空间自适应性的内画模型(spatially-adaptive)相结合,将视图绘制区域融合到分层深度图像中,形成一个递归算法,直到所有深度视图边缘都绘制完毕,形成更有质感的3D效果。
团队给每个分层深度图像都创建了一个像素单层,并将每个LDI像素与其四个相邻的基数像素连接起来。为了绘制缺失的视图节点,团队需要找到深度图像中的像素不连续点。在大多数由立体摄影方法或深度视图网络生成的分层深度图像中,像素之间的视图不连续点被模糊化,因此难以对它们进行精确定位。团队通过横向中值滤波器对深度图进行锐化处理,依托于相邻像素间的视差差值,在进一步的阈值化处理后得到像素不连续点。

图像描边锐化处理示意图
接着,团队将这些不连续点标记为1,将其他像素点标记为0,从而创建了二值映射。相邻的不连续像素被合并到一个大集合中。为了避免在像素结点处出现视图边缘合并的现象(即图像出现重影或伪影),团队通过解析深度视图的局部连接性,对像素的连接趋势加以预测,以快速将它们分离开来。团队将小于10像素的视图、孤立图像片段和悬空片段都删除,以保证图像的高清晰度。

处理图像伪影过程示意图
处理不完美的深度边缘
团队将合成区域扩大了5个像素,以消除修补视图区的伪影。递归算法每次都在一个预先计算好的深度边缘上运行,合成相邻遮挡区域的色相和像素内容,因此在边缘部位不连续点上的LDI像素要被断开,由邻近轮廓像素来补足空缺。
只有背景轮廓(红色部分)需要进一步内画,其周围的视图内容则扩展为“闭塞区域”。团队需对“闭塞区域”进行修复处理,通过生成一个合成区域和一个新像素的连续区域,构成二维像素坐标,继而从中提取出语境区域,将合成像素补入LDI像素中。
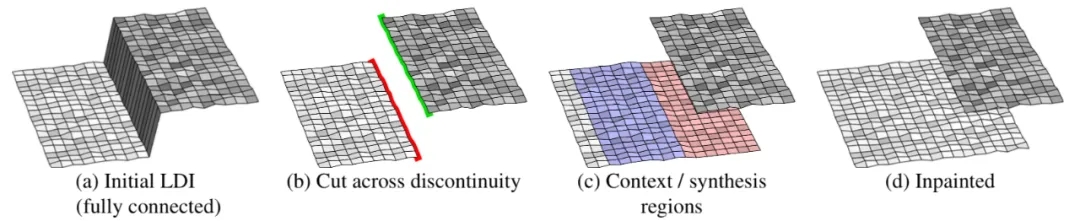
LDI 修复算法:(a) 初始 LDI 像素呈全连接态,深灰色区域为深度边缘;(b)深度边缘 LDI 像素连接被断开,分别形成前景轮廓(绿色)和背景轮廓(红色);(c) 从背景轮廓中提取语境区域(蓝色),重新生成合成区域(红色);(d) 将合成像素补入 LDI 像素。
在输入视图子集时,颜色、深度、提取以及连接的深度边缘的数值保持固定,由团队随机选择其中一个视图边缘作为变量,使用边缘修复网络来处理合成区域中的深度边缘,将修复后的边缘与输入的颜色相连接,并应用颜色修复网络生成修复用色相。就这样,修复后的深度边缘能与本身的视图深度连接起来,借助深度修复网络来修复视图深度。
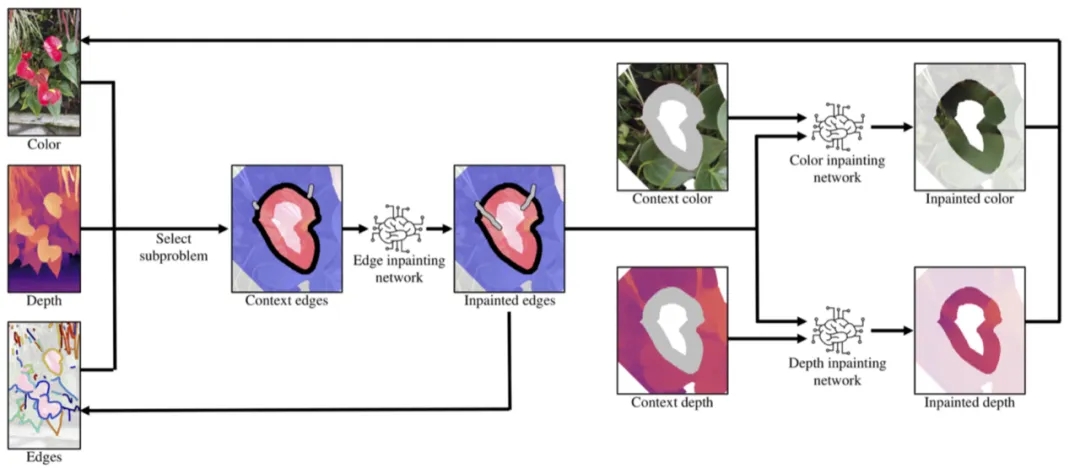
深度修复网络通过识别、分离和还原语境颜色来修复视图
这些被修复过的视图重返到原始视图中,即可生成3D纹理网格,只需在标准图形像引擎上加以简单的渲染,就能产生高质量的3D图像。

原始效果图(左)和局部放大后的效果图(最右)对比
与目前最先进的视图合成技术相比,新型LDI递归修复算法在视觉效果上更生动清晰,图像的视觉伪影也明显减少。可以预见,这种技术能将3D摄影带到更广阔的平台,让人们轻松地拍摄3D照片,拥有更深入的沉浸式体验。

 友情链接
友情链接