








公众号/将门创投
From: Tech Crunch; 作者:Iris
或许你曾留心过狗是怎么行走的——它们走起路来肌腱运动流畅,步履灵活,并不必去思考下一步要怎么走,走路这个动作是自然而然发生的事情。而同样的动作,机器狗能够处理得这样自然吗?
假设你有一只机器狗,你想让它像一只普通的狗一样跳起来接飞盘,但糟糕的是,它总是会迟疑那么几秒,或者误判了你的动作,只能笨笨地在原地打转。简单的走路和跳跃的动作,在机器狗身上却变得难以实现。为了解决这一难题,谷歌联合加州伯克利大学,捕捉真实动物的动作,将运动数据输入机器狗的学习库中,尝试让机器狗也能变成“有血有肉”的宠物。
谷歌AI:“没有什么动作口令,是我应付不了的”
首先让我们来看看Boston Dynamic公司研发的新型机器狗SpotMini。它由一套编程好的AI系统掌控自己的思维,有3D视觉效果的眼睛让内部AI看到外部环境。它能够踮足行走,像真的狗一样活泼地摇头晃脑着走路。
它也能打开门,任凭人类用绳子怎样拽着它,它都能“一往无前”。

为什么SpotMini能够这样灵活运动呢?事实上,它所使用的技术与谷歌AI项目的研究有着异曲同工之妙。
类人型机器人似乎并不比四足机器人好用,因此谷歌致力于找到一种将“敏捷行为”(如轻快的小跑或旋转的动作)从源目标转移到四足机器人的有效方法。换言之,谷歌是在寻找一种新的AI控制手法,来促使四足机器人更好地模仿动物的行为,即让机器人的动作自动触发下一套连锁反应,让AI控制变得更具任意性,从而提升它们的“肢体灵敏度”。
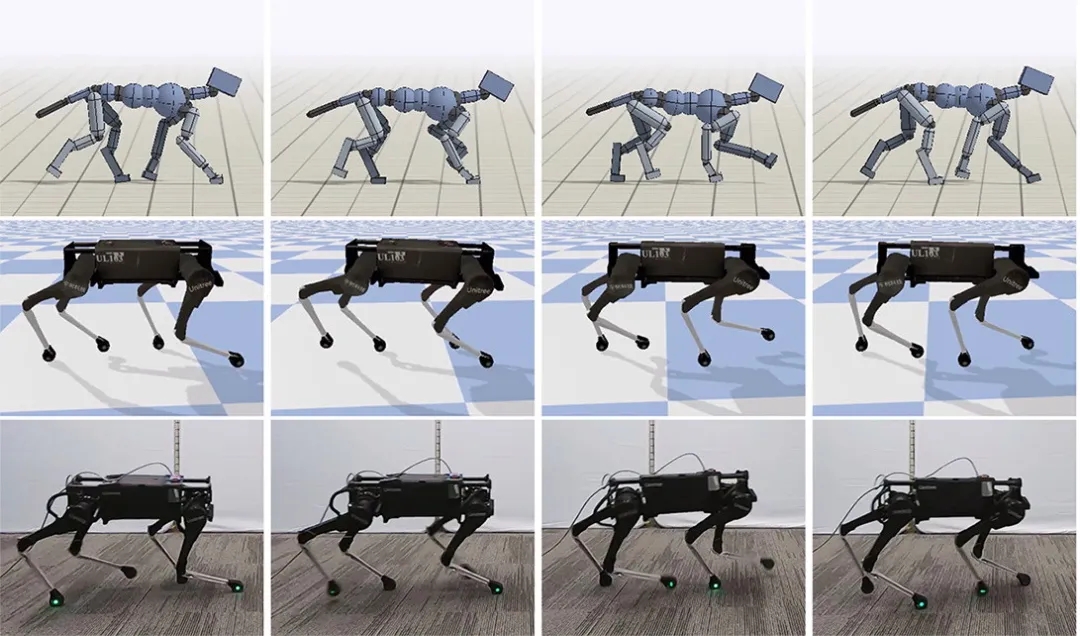
他们转向去研究那些真实的有血有肉的狗狗的运动数据,训练机器狗以不同速度来行走或旋转。通过展示动物在环境中移动的动力数据,让机器狗更快地学习这些技能。对训练动作加以手动调整也是必要的,以确保动物的动作能被机器狗更好地模仿。毕竟,机器狗不同于真正的狗,它没有脊椎,整个身体有点像一块砖头。因此,AI助手必须尽可能地让机器狗的动作与真实动物的动作相吻合。
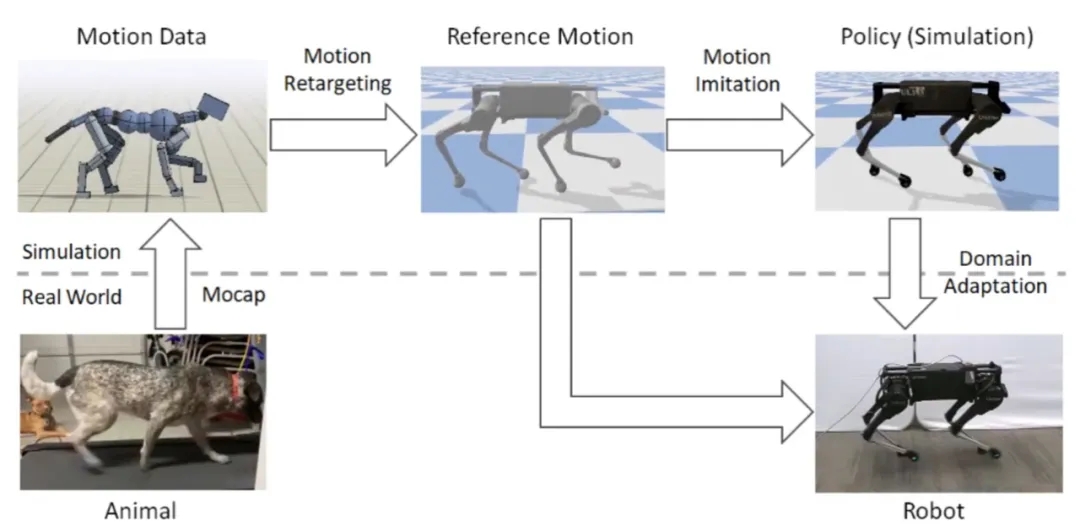
谷歌AI负责捕捉狗的动作,像脚和关节这样的关键点会被仔细追踪。它们模拟出一个虚拟的数字环境,导入机器狗和真正的狗的运动数据,让机器狗观看和模仿狗的动作,做到边走边学。但真正的问题是,当你试图用模拟学习的结果来控制一个机器狗时,你必须考虑到,现实世界并不是一个具有理想化的零摩擦物理规则的二维平面。这也就意味着未经修正的、完全基于虚拟模仿的步态会让机器狗在真正的地面上行走时遇到重重困难。
要解决这个问题其实非常简单。研究人员在模拟中使用的物理参数中加入了随机因素,比如让虚拟机器狗的重量增加,或者调低它们的马达驱动力、加大虚拟环境中的或地面摩擦力。让机器狗学会适应这种随机性变化,能促使它们学习走路的方法更加完善,可以模仿真正的狗的行走,甚至可以模仿更复杂的动作,如转弯和旋转,而不需要任何人工干预。

机器狗可以自学走路,但必须自行调整以避免走出指定区域,并在跌倒时能自己爬起来。有了这些基本技能,机器狗就可以在完全自主的情况下,在训练区域内学会连续走路,并接着学习更加复杂的运动技能。在不远的将来,我们也许可以期待谷歌自产的机器狗与SpotMini展开竞争的有趣场面。

 友情链接
友情链接