








自动驾驶离我们还有多远?从汽车诞生之初开始,安全、轻松的驾驶便成为了人类不断追求的目标,早在上个世纪20年代,人们便开始有了让汽车自行驾驶的种种构想和实践。
1925年,世界上第一辆有证可查的无人驾驶汽车Linrrican Wonder便出现在了美国纽约街头,这辆车能实现“自行驾驶”是因为后方有一辆跟车通过无线电波来操控方向盘、离合器和制动器等等,帮助前车“自动”完成转弯、刹车、鸣笛等操作。
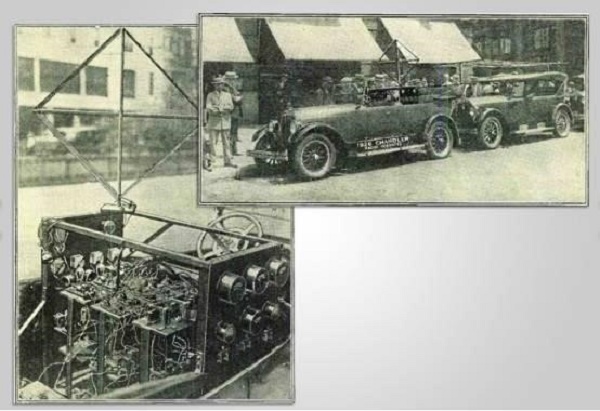
世界上第一辆“无人驾驶”汽车 Linrrican Wonder
虽然这种“跟车操控”的方式与自动驾驶解放人类双手的目的多有相悖,但这辆“美国奇迹”还是被认为是实现自动驾驶的最初尝试。1977年,日本筑波工程实验室研发出了世界上第一台基于摄像头来检测前方路况实现导航的自动驾驶汽车,借助车身配备的两个摄像头,这辆车可以检测到前路的标识,并通过计算来确定驾驶路线。
相较于Linrrican Wonder, 包括早期用脉冲信号实践自动驾驶导航的Firebird II概念车等,日本筑波工程实验室的这次实践则基本奠定了大多自动驾驶技术研发车企如奥迪、沃尔沃、特斯拉等的自动驾驶解决方案——通过不断全面的检测系统、计算性能和驾驶辅助帮助汽车在特定情形下实现更高的自动驾驶能力。

全球首款搭载Level 3自动驾驶技术的量产车:全新奥迪A8
以奥迪为例,奥迪于今年7月全球首发了全新一代奥迪A8,这款旗舰车型最亮眼的便是将量产车的自动驾驶技术推向了Level 3级别。在车速小于或等于60公里/小时,用户可以启动道路拥堵状况下的自动驾驶功能(Traffic Jam Pilot) ,届时车辆将接管油门、刹车、转向系统,自行在拥堵的主干道或者高速公路上跟车、起步甚至变道,用户可以完全解放双手。而整套系统背后,正是不断精进的传感器技术、拥有强大运算性能的中央驾驶员辅助控制单元以及二者与其他技术的精确交互在提供有力支撑。

奥迪首开全球先河,率先采用激光扫描仪(中间)
传感器方面,除了常见的摄像头和雷达检测外,奥迪也首开全球汽车业先河,率先采用了激光扫描仪识别车辆前方区域,以此对远程雷达和前段摄像头的成像形成了补充。远程雷达能够检测前方车辆及其与本车之间的相对运动,激光扫描仪用经过精确测定的立方体来描述这些车辆,还能识别道路两旁的防撞护栏等设施的距离和相对大小。前端摄像头也是一台光学传感器,能够对轿车、卡车、行人和骑车人——尤其是城市环境中的行人和骑车人——等相关对象进行准确归类。除此之外,它还能传送车道标线、可行驶路面以及交通标志信息。
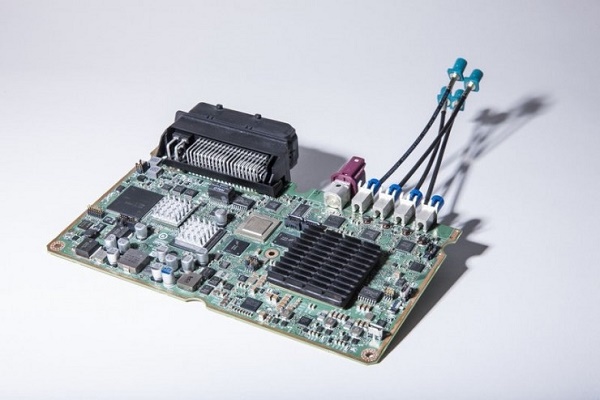
奥迪自动驾驶技术超级计算中心:中央驾驶员辅助控制单元(zFAS)
传感器系统收集的所有测量值均由中央驾驶员辅助控制单元(zFAS)进行处理。目前zFAS提供的运算能力已经超过了前代奥迪A8整车运算能力的总和。传感器数据会送到所谓的zFAS“融合层”,经过处理后生成一个360°的环境模型,包含移动物体、静态障碍物和道路模型,其中,道路模型由传统导航地图以及传感器识别的路面标记和轮廓共同生成。zFAS对车辆的行驶状况和周围环境判断、处理后,再反馈给自动驾驶辅助系统,最后,用户直接通过中央界面操作便可实现自动驾驶的所有功能。可以说,zFAS综合了传感器数据融合、场景分析、决策与车辆控制等重要任务,保证了自动驾驶功能的顺利运行。
此外,作为“量产级别”的自动驾驶技术,奥迪自动驾驶技术也综合运用了多样的技术来确保自动驾驶的安全性,这也是奥迪在量产自动驾驶时做的最多的工作。例如,制动系统,全新奥迪A8配备了一个驾驶员状态传感器以及电容方向盘,它们能够判断驾驶员的双手是否放在方向盘上,该系统能使车辆在主动式交通拥堵自动驾驶与手动驾驶之间平顺切换、无缝过渡。即便意外出错,车辆也能确保达到安全状态。
从技术层面来看,奥迪的自动驾驶技术已引领着全新奥迪A8实现更高的自动驾驶能力,并不断迈近人类的自动驾驶设想。虽然在相关法律、法规仍不够完备和道路、停车场标示等还需更加标准化的实际情况下,我们依旧无法回答出自动驾驶离我们还有多远这个问题,但充足的技术准备必定不可或缺。
雷锋网原创文章,未经授权禁止转载。

 友情链接
友情链接